A member of The University of Tulsa’s mechanical engineering faculty is pushing the boundaries of robotic grasping with a new anthropomorphic robotic hand.
Associate Professor Joshua Schultz, Ph.D., started this work years ago during his postdoctoral fellowship at the Istituto Italiano di Tecnologia in Genoa, Italy, one of the world’s leading centers for robotic hands research. He performed his postdoctoral training under famed scientist Antonio Bicchi.
“Back then robot hands were at either one extreme or the other,” Schultz explained. “Robot hands either had a lot of motors, at least one per finger, or they had a single motor and used some sort of ‘trick’ to make the hand close in a humanlike way.”
Robotic hands with two to four motors were rare. The hands that did have multiple motors usually had arbitrary choices made by the designer, such as using a motor for just the index finger – the finger the designer found most important. The rest of the hand would have one motor, tying the three other fingers together in a way that limited functionality.
Wanting to fill the gap between a single-motor and multi-motor hand, Schultz started to create a solution that has the power to revolutionize robotic hand research.
“I decided to take a more systematic approach, using the concept of multiport networks to explain the relationship between the motors and the fingers and how they should transmit motion to the fingers,” he explained.
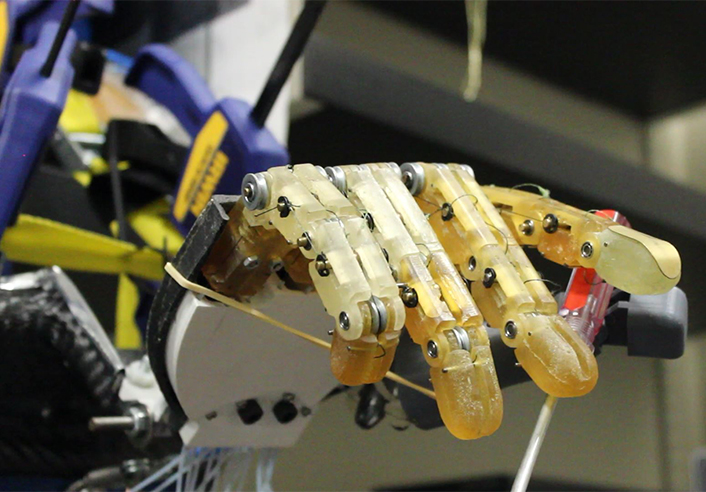
This led to the creation of The University of Tulsa Anthropomorphic Robot Hand. The project involved two doctoral students, two master’s students and a senior capstone design team. The hand was also supported by the National Science Foundation’s National Robotics Initiative.
The hand has four motors: two for the thumb and two for the fingers. Despite the thumb having four to five degrees of freedom and the fingers having 16, the hand achieves complex motion. Schultz’s team studied hands treated for arthritis for this solution.
“For the thumb, we looked at patients who had joints fused to avoid pain from arthritis. We learned that even with a fused metacarpal-phalangeal joint, their hand still has a lot of function,” he said. “We then fused the same joint in the robotic hand. One motor flexes and extends the thumb while the other moves it side to side.”
The fingers operate through a spring-based transmission system. Instead of motors pulling tendons directly, they pull on springs, which then move the tendons.
This spring in the transmission allows the hand to conform to irregular objects while grasping. By adjusting where tendons connect to the spring, Schultz’s team can control how the hand behaves – whether forming a fist or pinching an object.
Schultz emphasizes that the goal for the hand is for it to enhance robotic capabilities so that it can help with human flourishment.
“Making robots truly useful in the home, business, search and rescue, agriculture and medicine will require some major developments in robotic grasping,” he explained. “Since it’s like a human hand, we hope to use it to better enhance robotic grasping so that we can make major strides.”
Schultz mentioned that this project would not have been possible without the environment and students at UTulsa.
“Being able to do this work here has made a tremendous difference,” he said. “This was a team effort, and I never could have succeeded without the students here who did the work on the hand.”
“I think this robot is a great team project for students. Robotic hands take inspiration from something complex to then make something pragmatic,” said Spenser Pulleyking (B.S. ‘17), a mechanical engineering doctoral student. “Studying hands teaches us something about ourselves and how engineering and design change over time.”
Despite the rapid progress, Schultz cautions against fears of robotic advancement.
“Robot hands still cannot tie a child’s shoes or make an omelet with fresh, shelled eggs,” he explained. “We have a long way to go in dexterity, durability and reliability. I look forward to continuing this work here in the College of Engineering & Computer Science with more students.”